
- English
- Español
- Português
- русский
- Français
- 日本語
- Deutsch
- tiếng Việt
- Italiano
- Nederlands
- ภาษาไทย
- Polski
- 한국어
- Svenska
- magyar
- Malay
- বাংলা ভাষার
- Dansk
- Suomi
- हिन्दी
- Pilipino
- Türkçe
- Gaeilge
- العربية
- Indonesia
- Norsk
- تمل
- český
- ελληνικά
- український
- Javanese
- فارسی
- தமிழ்
- తెలుగు
- नेपाली
- Burmese
- български
- ລາວ
- Latine
- Қазақша
- Euskal
- Azərbaycan
- Slovenský jazyk
- Македонски
- Lietuvos
- Eesti Keel
- Română
- Slovenski
- मराठी
- Srpski језик

Artikel untuk memahami perbedaan antara motor stepper dan servo dan motor servo
I. Perbedaan motor stepper dengan servo dan motor servo
Motor stepper: adalah sinyal pulsa listrik menjadi perpindahan sudut atau perpindahan garis dari bagian motor stepper elemen kontrol loop terbuka. Sederhananya, ia mengandalkan sinyal pulsa listrik untuk mengontrol sudut dan jumlah putaran. Jadi dia hanya mengandalkan sinyal pulsa untuk menentukan berapa putarannya. Karena tidak ada sensor, sudut berhenti mungkin menyimpang. Namun, sinyal pulsa yang tepat meminimalkan penyimpangan.
Motor servo: mengandalkan rangkaian kontrol servo untuk mengontrol kecepatan motor, melalui sensor untuk mengontrol posisi putaran. Jadi kontrol posisinya sangat tepat. Dan kecepatan putarannya juga bervariasi.
Servo (Servo Elektronik): Komponen utama servo adalah motor servo. Ini berisi rangkaian kontrol motor servo + set gigi reduksi. Oh iya, motor servo tidak mempunyai gigi reduksi. Dan servo memiliki set gigi reduksi.
Dalam kasus servo batas, ia mengandalkan potensiometer di bawah poros keluaran untuk menentukan sudut kemudi lengan kemudi. Kontrol sinyal servo merupakan sinyal termodulasi lebar pulsa (PWM), dimana mikrokontroler dapat dengan mudah menghasilkan sinyal tersebut.
II. Prinsip dasar motor stepper
Cara kerjanya:
Biasanya rotor motor adalah magnet permanen, dan ketika arus mengalir melalui belitan stator, belitan stator menghasilkan medan magnet vektor. Medan magnet ini akan menggerakkan rotor untuk berputar membentuk suatu sudut, sehingga arah pasangan medan magnet rotor akan sama dengan arah medan magnet stator. Ketika medan magnet vektor stator berputar membentuk sudut. Rotor juga berputar membentuk sudut dengan medan magnet ini. Untuk setiap pulsa listrik masukan, motor berputar satu langkah sudut ke depan. Perpindahan sudut keluarannya sebanding dengan jumlah pulsa masukan, dan kecepatan putarannya sebanding dengan frekuensi pulsa. Dengan mengubah urutan pemberian energi pada belitan, motor akan berbalik arah. Oleh karena itu, jumlah dan frekuensi pulsa serta urutan pemberian energi pada belitan setiap fasa motor dapat dikontrol untuk mengontrol putaran motor stepper.
Prinsip pembangkitan panas:
Biasanya melihat semua jenis motor, bagian dalamnya adalah inti besi dan kumparan belitan. Resistansi belitan, daya akan menghasilkan rugi-rugi, ukuran rugi-rugi dan hambatan serta arus sebanding dengan kuadrat, yang sering disebut rugi-rugi tembaga, jika arusnya bukan standar DC atau gelombang sinus, juga akan menghasilkan rugi-rugi harmonik; inti memiliki efek arus eddy histeresis, dalam medan magnet bolak-balik juga akan menghasilkan kerugian, ukuran material, arus, frekuensi, tegangan terkait, yang disebut kehilangan besi. Kehilangan tembaga dan kehilangan besi akan diwujudkan dalam bentuk pembangkitan panas, sehingga mempengaruhi efisiensi motor. Motor loncatan umumnya mengejar akurasi posisi dan keluaran torsi, efisiensi relatif rendah, arus umumnya lebih besar, dan komponen harmoniknya tinggi, frekuensi arus bolak-balik dengan kecepatan dan perubahan, sehingga motor loncatan umumnya memiliki situasi panas, dan situasinya lebih serius daripada motor AC pada umumnya.
AKU AKU AKU. Konstruksi kemudi
Servo terutama terdiri dari rumahan, papan sirkuit, motor penggerak, peredam roda gigi, dan elemen pendeteksi posisi. Prinsip kerjanya adalah penerima mengirimkan sinyal ke servo, dan IC pada papan sirkuit menggerakkan motor tanpa biji untuk mulai berputar, dan daya disalurkan ke lengan ayun melalui roda gigi reduksi, dan pada saat yang sama, detektor posisi mengirimkan sinyal kembali untuk menentukan apakah sudah sampai pada posisi atau belum. Detektor posisi sebenarnya adalah resistor variabel. Ketika servo berputar maka nilai resistor akan berubah, dan sudut putaran dapat diketahui dengan mendeteksi nilai resistor. Motor servo umum adalah kawat tembaga tipis yang dililitkan pada rotor tiga kutub, ketika arus mengalir melalui kumparan akan menghasilkan medan magnet, dan magnet di pinggiran rotor akan menghasilkan tolakan, yang pada gilirannya menghasilkan gaya putaran. Menurut ilmu fisika, momen inersia suatu benda berbanding lurus dengan massanya, sehingga semakin besar massa benda yang akan diputar maka semakin besar pula gaya yang diperlukan. Untuk mencapai kecepatan putaran yang cepat dan konsumsi daya yang rendah, servo terbuat dari kabel tembaga tipis yang dipilin menjadi silinder berongga yang sangat tipis, membentuk rotor berongga yang sangat ringan tanpa kutub, dan magnet ditempatkan di dalam silinder, yaitu motor cangkir berongga.
Untuk menyesuaikan dengan lingkungan kerja yang berbeda, terdapat servo dengan desain tahan air dan tahan debu; dan untuk memenuhi kebutuhan beban yang berbeda, terdapat roda gigi plastik dan logam untuk servo, dan roda gigi logam untuk servo umumnya memiliki torsi tinggi dan kecepatan tinggi, dengan keuntungan bahwa roda gigi tidak akan terkelupas karena beban yang berlebihan. Servo dengan kualitas lebih tinggi akan dilengkapi dengan bantalan bola untuk membuat putaran lebih cepat dan akurat. Terdapat perbedaan antara satu bantalan bola dengan dua bantalan bola, tentunya kedua bantalan bola tersebut lebih baik. Servo FET baru sebagian besar menggunakan FET (Field Effect Transistor), yang memiliki keunggulan resistansi internal yang rendah sehingga kehilangan arus lebih sedikit dibandingkan transistor normal.
IV. Prinsip operasi servo
Dari gelombang pwm ke rangkaian internal untuk menghasilkan tegangan bias, generator kontaktor melalui roda gigi reduksi menggerakkan potensiometer untuk bergerak, sehingga ketika perbedaan tegangan nol, motor berhenti, sehingga mencapai efek servo.
Protokol untuk PWM servo semuanya sama, tetapi servo terbaru yang muncul mungkin berbeda.
Protokol umumnya: lebar tingkat tinggi dalam 0,5 ms ~ 2,5 ms untuk mengontrol servo agar berputar melalui sudut yang berbeda.
V. Cara kerja motor servo
Gambar di bawah menunjukkan rangkaian kendali motor servo yang dibuat dengan power operasional amplifier LM675, dan motor tersebut adalah motor servo DC. Terlihat dari gambar, penguat operasional daya LM675 disuplai oleh 15V, dan tegangan 15V ditambahkan ke input sefasa penguat operasional LM675 melalui RP 1, dan tegangan keluaran LM675 ditambahkan ke input motor servo. Motor dilengkapi dengan generator sinyal pengukuran kecepatan untuk mendeteksi kecepatan motor secara real-time. Faktanya, generator sinyal kecepatan adalah sejenis generator, dan tegangan keluarannya sebanding dengan kecepatan putaran. Output tegangan dari generator sinyal pengukur kecepatan G diumpankan kembali ke input pembalik penguat operasional sebagai sinyal kesalahan kecepatan setelah rangkaian pembagi tegangan. Nilai tegangan yang ditetapkan oleh potensiometer perintah kecepatan RP1 ditambahkan ke input sefasa penguat operasional setelah pembagian tegangan dengan R1.R2, yang setara dengan tegangan referensi.
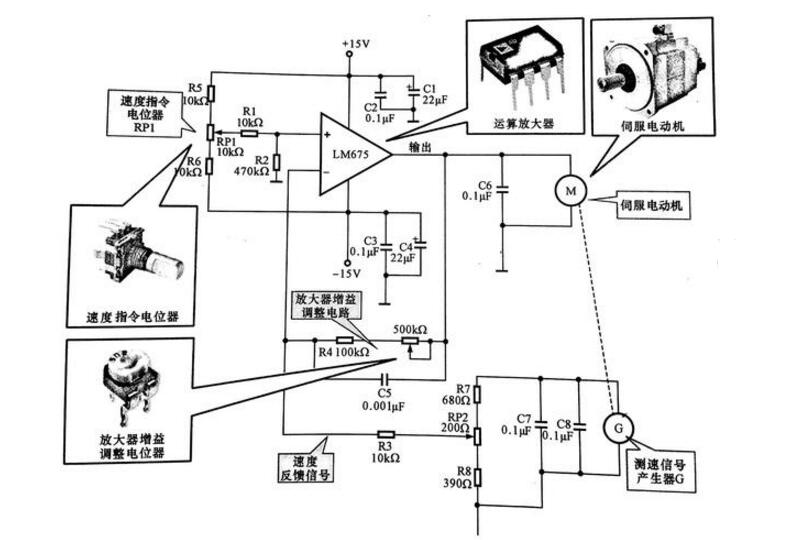
Skema kendali motor servo
Servomotor : Ditunjukkan dengan huruf M untuk servomotor, merupakan sumber tenaga untuk sistem penggerak. Penguat operasional: dilambangkan dengan nama rangkaian, yaitu LM675, merupakan bagian penguat pada rangkaian kontrol servo yang menyediakan arus penggerak untuk motor servo.
Potensiometer perintah kecepatan RP1: Mengatur tegangan referensi penguat operasional di sirkuit, yaitu pengaturan kecepatan. Potensiometer penyesuaian penguatan penguat RP2: Digunakan dalam rangkaian untuk menyempurnakan penguatan penguat dan ukuran sinyal umpan balik kecepatan.
Ketika beban motor berubah, tegangan yang diumpankan kembali ke input terbalik penguat operasional juga berubah, yaitu ketika beban motor bertambah, kecepatan menurun, dan tegangan keluaran generator sinyal kecepatan juga menurun, sehingga tegangan pada masukan terbalik penguat operasional berkurang, dan selisih antara tegangan ini dan tegangan referensi meningkat, dan tegangan keluaran penguat operasional meningkat. Sebaliknya, ketika beban menjadi lebih kecil dan kecepatan motor meningkat, tegangan keluaran generator sinyal pengukur kecepatan meningkat, tegangan umpan balik yang ditambahkan ke masukan terbalik dari penguat operasional meningkat, perbedaan antara tegangan ini dan tegangan referensi berkurang, tegangan keluaran penguat operasional menurun, dan kecepatan motor menurun, sehingga kecepatan putaran dapat distabilkan pada nilai yang ditetapkan secara otomatis.


